سهشنبه 22 مهر 1399 کد خبر: 33
۱- مقدمه
برای مشاهدهی اجسام و نمونههای با ابعاد بسیار ریز در حد مولکولهای کوچک و اتمها، نمیتوان از میکروسکوپهای معمولی استفاده کرد؛ چرا که این نمونهها، ابعاد نانومتری دارند و میکروسکوپهای معمولی، قادر به نشان دادن ابعاد نانومتری نیستند. بنابراین برای دیدن نمونههایی با ابعاد نانومتری، باید از ابزارهای دقیقتر و پیشرفتهتر استفاده شود. یکی از این ابزارها، میکروسکوپ نیروی اتمی (AFM)[۱] است. میکروسکوپ نیروی اتمی قادر به تصویربرداری با تفکیک مکانی اتمی از نمونههای رسانا، نارسانا و حتی نمونههای بیولوژیکی میباشد.
این میکروسکوپ نقش به سزایی در پیشرفت علوم مختلف از جمله الکترونیک، نانوفناوری و علم مواد ایفا میکند. امروزه دستگاههای تجاری متفاوتی با مبانی مشابه و حالات کاری مختلف عرضه شدهاند که از نظر دقت و کیفیت تصاویر با یکدیگر تفاوت دارند. در این مقاله ضمن معرفی میکروسکوپ نیروی اتمی و نحوه عملکرد آن، مدهای کاری مختلف و مزایا و معایب هرکدام مورد بررسی قرار میگیرد.
۲- تاریخچه
گرد کارل بینیگ[۲] بر اساس طراحیهای قبلی که با همکاری هاینرک روهرر[۳]، در آزمایشگاه تحقیقاتی زوریخ IBM، در جهت طراحی و ساخت میکروسکوپ تونلی روبشی(STM) [۴]، صورت داده بود، در سال ۱۹۸۶ میلادی با همکاری کلوین کوایت[۵]و کریستف گربر[۶] از دانشگاه استانفورد، میکروسکوپ نیروی اتمی(AFM)، را ارائه نمود. هدف او از این کار اندازهگیری نیروهای بسیار ناچیز (کمتر از (۱µN، بین نوک سوزن AFM و سطح نمونه مورد بررسی بود [۱]. تولیدات تجاری این محصولات، با میکروسکوپ STM در سال ۱۹۸۷میلادی و میکروسکوپهایAFM، در ۱۹۸۹ میلادی کلید خورد. به دنبال اختراع STM و سپس AFM، تلاشهای بسیاری جهت مطالعه مورفولوژی و ساختار سطوح و فصل مشترک آنها صورت گرفت و در بازه کوتاهی از زمان، بسیاری دیگر از ابزارهای شناسایی با مبانی مشابه درعملکرد، تحت عنوان کلی میکروسکوپهای پروبی روبشی، ساخته و به جهان علم ارائه گردیدند [۲و۳].
۳- دامنه کاربرد میکروسکوپ نیروی اتمی
در حالی که میکروسکوپ تونلی روبشی، تنها میتواند جهت مطالعه سطوحی که از لحاظ الکتریکی درجاتی از رسانایی دارند، استفاده شود، میکروسکوپهای نیروی اتمی میتوانند جهت مطالعه هر نوع سطح مهندسی استفاده شوند؛ بنابراین میتوان از آن جهت مطالعه انواع مواد رسانا، نیمه رسانا و نارسانا استفاده نمود.
امروزه AFM، یک کاوشگر سطحی محبوب برای اندازهگیریهای توپوگرافیک و محاسبه نیروهای عمودی در مقیاس میکرو تا نانو شناخته شده است. همچنین از این دستگاه مشخصهیابی، میتوان برای مطالعه خراش و سائیدگی و نیز اندازهگیری خواص مکانیکی الاستیک و پلاستیک (از قبیل میزان سختی جسم در برابر جسم فرورونده[۷] و مدول الاستیسیته) استفاده نمود [ ۴و۵].
از AFM در بسیاری از مطالعات، جهت نوشتار، دستکاری و جابجایی اتمهای منفرد زنون [۶]، مولکولها [۷]، سطوح سیلیکونی [۸] و پلیمری [۹] به کار گرفته شده است. علاوه بر این از این میکروسوپ جهت انواع نانولیتوگرافی و تولید نانوساختارها [۱۰] و نانوماشینکاری استفاده شده است.
میکروسکوپهای نیروی اتمی که برای اندازهگیری نیروهای عمودی و جانبی، طراحی شدهاند، میکروسکوپهای نیروی جانبی [۸]، یا میکروسکوپهای نیروی اصطکاکی [۹] نامیده میشوند [۱۱]. دستهای ازFFMها از توانایی اندازهگیری نیروهای جانبی در دو جهت متعامد برخوردارند [۱۲]. محققین بسیاری طراحیهای AFM و FFM را اصلاح کرده و بهبود دادهاند و هماکنون این سیستمهای بهبود داده شده، جهت اندازهگیری چسبندگی، اصطکاک و نیروهای پیوندی در سطوح جامد و مایع در مقیاس نانو و میکرو بهکار میروند [۱۳و۱۴].
۴- سیستم دستگاهی میکروسکوپ روبشی نیروی اتمی
میکروسکوپ روبشی نیروی اتمی AFM سطح نمونه را توسط یک سوزن تیز، به طول ۲ میکرون و غالبا قطر نوک کمتر از ۱۰ نانومتر آنالیز میکند. سوزن در انتهای آزاد یک انبرک (کانتیلور)[۱۰] به طول حدود ۱۰۰ تا ۴۵۰ میکرون قرار دارد.
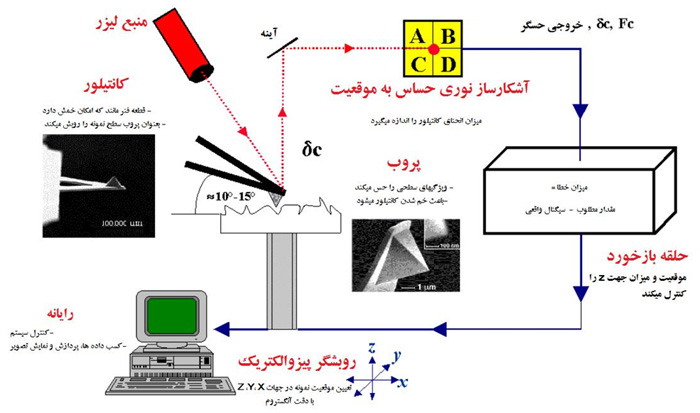
شکل ۱- اجزاء کلی میکروسکوپ نیروی اتمی و عملکرد آنها [۱۵]
نیروهای بین سوزن و سطح نمونه باعث خم شدن یا انحراف کانتیلور شده و یک آشکارساز میزان انحراف کانتیلور را در حالیکه سوزن سطح نمونه را روبش میکند یا نمونه در زیر سوزن روبش میشود؛ در سیستمهایی که نمونه حرکت روبشی را انجام میدهد، اندازه میگیرد. میتوان از انحراف کانتیلور برای ورودی یک مدار بازخورد استفاده کرد که روبشگر پیزوالکتریک[۱۱] را در مواجهه با توپوگرافی سطح نمونه به گونه ای در جهت z بالا و پایین میبرد که میزان انحراف کانتیلور ثابت بماند. اندازهگیری انحرافات کانتیلور به کامپیوتر امکان تولید تصویر توپوگرافی سطح را میدهد.
۵- آشکارسازی موقعیت کانتیلور
در اغلب AFMهایی که امروزه عرضه میشود، موقعیت کانتیلور را با استفاده از روشهای اپتیکی تعیین میکنند. متداولترین آنها در شکل ۲ نشان داده شده است.
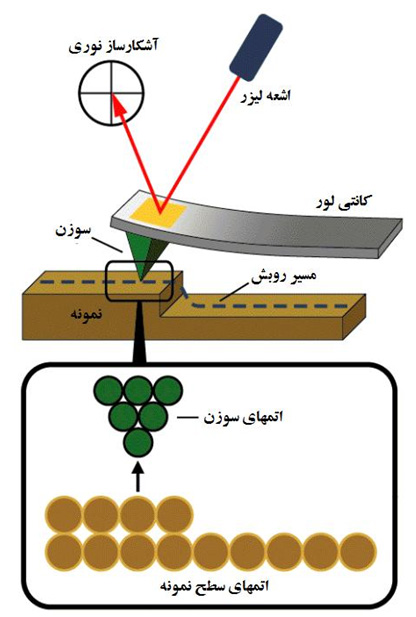
شکل ۲- نحوه آشکارسازی موقعیت کانتیلور با روش متداول در میکروسکوپ نیروی اتمی [۱۶]
یک اشعه لیزری به پشت کانتیلور به سمت یک آشکارساز نوری حساس به موقعیت [۱۲] منعکس میشود. با خم شدن کانتیلور محل اشعه لیزر روی آشکارساز تغییر کرده و PSPD میتواند جابهجایی به کوچکی ۱۰ آنگستروم (۱ نانومتر) را اندازهگیری کند. نسبت فاصله بین کانتیلور و آشکارساز به طول کانتیلور به عنوان یک تقویت کننده مکانیکی عمل میکند. در نتیجه سیستم میتواند حرکت عمودی کمتر از آنگستروم نوک کانتیلور را اندازهگیری کند. روشی دیگر جهت آشکارسازی انحراف آشکارساز بر مبنای تداخل اپتیکی میباشد. از مواد مورد استفاده رایج در ساخت کانتیلورها میتوان به الماس، Si3N4، Si، W و Ir اشاره نمود [۱۷].
۶- انواع نیروهای موجود در عملیات روبش
میکروسکوپهای نیروی اتمی در حین کار با نیروهایی نظیر نیروهای کوتاه برد، الکترواستاتیک، موئینگی و ... روبهرو هستند. به عنوان مثال در زیر به دو نیرویی که علاوه بر نیروی دافعه واندروالس، در حین عملیات AFM استاتیکی حضور دارند، اشاره میشود:
۱-۶- نیروی اعمالی توسط کانتلیور
نیرویی که توسط خود کانتیلور اعمال میشود، مانند نیروی یک فنر فشرده است. اندازه و علامت (جاذبه یا دافعه) نیروی کانتیلور به انحراف کانتیلور و ثابت فنر آن بستگی دارد.
۲-۶- نیروی موئینگی[۱۳]
نیروی موئینگی معمولا توسط لایه نازک آب (که ممکن است از رطوبت محیط ناشی گردد) اعمال میشود. نیروی موئینگی هنگامی بهوجود میآید که لایهای از آب دور سوزن ایجاد گردد. در این حالت نیروی جاذبه قوی حدود ۸-۱۰ نیوتن پدیدار میشود که در این حالت سوزن را در تماس با سطح نگه میدارد. بزرگی نیروی موئینگی به فاصله سوزن تا نمونه بستگی دارد. تا زمانی که سوزن با نمونه تماس دارد، نیروی موئینگی ثابت میباشد. همچنین فرض میشود که لایه آب تقریبا همگن است.
در نتیجه نیروی متغیر در AFM استاتیکی باید توسط نیروی دافعه واندروالس جبران گردد. اندازه نیروی کل اعمال شده بر نمونه از ۸-۱۰ نیوتن (در شرایطی که تقریبا آب سوزن را به طرف نمونه میکشد و کانتیلور آن را از نمونه میراند) تا محدوده معمولتر ۶-۱۰ تا ۷-۱۰ نیوتن تغییر میکند [۳].
۷- حالات کاری میکروسکوپ روبشی نیروی اتمی
در هنگام کار با میکروسکوپ نیروی اتمی، نیروهای مختلفی در انحراف کانتیلور AFM مشارکت میکنند. از جمله این نیروها میتوان به نیروهای بین اتمی یا نیروهای واندروالس اشاره نمود. وابستگی نیروی واندوالس به فاصله سوزن و نمونه در شکل ۳، نشان داده شده است.
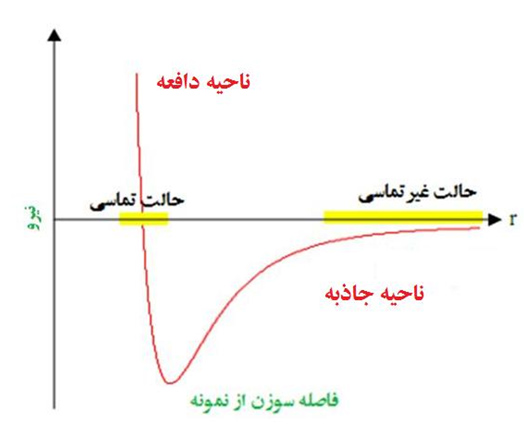
شکل ۳- نمودار انرژی پتانسیل پروب و نمونه [۱۶]
در شکل ۳، دو حالت مربوط به دو ناحیه علامت گذاری شده است:
۱-حالت استاتیکی(DC-AFM) یا حالت دفعی
۲-حالت دینامیکی (AC-AFM)یا حالت جذبی
۱-۷- حالت استاتیکی
در حالت استاتیکی یا ایستا، نوک پروب در فاصله چند آنگسترومی از سطح قرار گرفته و تقریبا در تماس با سطح قرار میگیرد. در این حالت نیروی بین اتم نوک پروب و سطح نمونه دافعه بوده و نیروی بین سایر اتمهای پروب و سطح نمونه همچنان جاذبه است. در مد استاتیکی، پستی و بلندیهای موجود بر روی سطح نمونه منجر به خم شدن کانتلیور میشود. خمش کانتلیور سبب جابهجایی بازتابش اشعه لیزر بر روی کانتلیور شده و این تغییر در زاویه بازتابش به آشکارساز ارسال میشود.
۱-۱-۷- حالت ارتفاع ثابت
در حالتی که ارتفاع روبشگر پیزو در حین روبش ثابت است، تغییرات انحراف کانتیلور میتواند مستقیما برای تولید اطلاعات توپوگرافی استفاده شود. از این حالت، اغلب برای ایجاد تصاویر در مقیاس اتمی از سطوحی که در حد اتمی مسطح هستند، استفاده میگردد. در اینجا انحرافات کانتیلور و بنابراین تغییرات در نیروی اعمالی، کوچک است. حالت ارتفاع ثابت برای ثبت تصاویر همزمان[۱۴] سطوح در حال تغییر، که سرعت بالای روبش ضروری است، مورد نیاز است.
۲-۱-۷- حالت نیروی ثابت
میتوان از انحراف کانتیلور برای ورودی یک مدار بازخورد استفاده کرد که روبشگر پیزوالکتریک را در مواجهه با توپوگرافی سطح نمونه به گونهای در جهت z بالا و پایین میبرد که میزان انحراف کانتیلور ثابت بماند. در این مورد، تصویر از حرکت روبشگر پیزو تولید میشود. با ثابت نگه داشتن انحراف کانتیلور، کل نیروی اعمالی بر نمونه ثابت خواهد بود. در حالت نیروی ثابت، سرعت روبش با زمان واکنش مدار بازخورد محدود میشود، ولی کل نیروی اعمالی توسط سوزن بر نمونه به خوبی کنترل میگردد. برای بسیاری از کاربردها، حالت نیروی ثابت ترجیح داده میشود.
۲-۷- حالت دینامیکی
در حالت دینامیکی پروب با فرکانس (۱۰۰-۴۰۰ هرتز) و دامنه (چند دهم آنگستروم) مشخصی نوسان میکند. در حالت دینامیکی کانتیلور در فاصله چند ده تا چند صد آنگستروم از سطح نمونه قرار داده میشود و در این حالت نیروی بین اتمی بین کانتیلور و نمونه (عمدتا به دلیل برهمکنشهای واندروالس دوربرد)، نیروی جاذبه است.
۱-۲-۷- حالت دینامیکی غیرتماسی
در این حالت کانتلیور میکروسکوپ نیروی اتمی با نوسان مشخصی در فاصله کم از سطح نمونه نوسان میکند. نیروی بین پروب و سطح نمونه از نوع جاذبه است. نیروهای واندروالس بین نوک پروب و سطح نمونه باعث تغییرات فرکانس نوسان کانتلیور شده و تغییر فرکانس کانتلیور به وسیله قطعه پیزوالکتریک متصل به کانتلیور اندازهگیری و برای ساخت تصویر استفاده میشود. با وجود این كه توليد تصویر اتمي با ميكروسكوپ نيروي اتمي دشوارتر از ميكروسكوپ تونلي روبشي است ولي حالت دینامیک غيرتماسي ميتواند در خلاء بسيار بالا، قدرت تفكيك اتمي ایجاد كند.
۲-۲-۷- حالت دینامیکی ضربهای
در این حالت کانتلیور با فرکانس مشخصی بر روی سطح نمونه ضربه وارد میکند. در نتیجه در صورت وجود پستی و بلندی دامنه نوسانات کانتلیور دچار تغییر شده و این تغییر بوسیله قطعه پیزوالکتریک متصل به کانتلیور ثبت میشود.
۸- مزایا و معایب حالات استاتیکی و دینامیکی
مزایای میکروسکوپهای نیروی اتمی دینامیکی بدین صورت میباشد که توپوگرافی نمونه بدون تماس یا با تماس خیلی کم بین سوزن و نمونه اندازهگیری میشود. کل نیروی بین سوزن و نمونه در حالت دینامیکی بسیار کم است (معمولا حدود ۱۲-۱۰ نیوتن). این نیروی کم مزیتی، برای مطالعه نمونههای نرم یا الاستیک به شمار میرود. همچنین نمونههایی مانند ویفرهای سیلیکونی از طریق تماس با سوزن آلوده نمیشوند. از طرف دیگر به دلیل اینکه نیروی بین سوزن و نمونه در حالت دینامیکی کم است، اندازهگیری آن مشکلتر از نیروی چندین بار بزرگتر حالت استاتیکی است.
علاوه بر این کانتیلورهای استفاده شده برای AFMهای دینامیکی باید نسبت به کانتیلورهای AFMهای استاتیکی سفتتر باشند، زیرا کانتیلور نرم میتواند به طرف سمت سطح نمونه کشیده شده و در تماس با آن قرار گیرد. از طرفی، حالت دینامیکی برای اندازهگیری نمونههای نرم بر حالت استاتیکی ترجیح داده میشود. مقدار کم نیرو و سفت بودن کانتیلورها، در حالت دینامیکی، هر دو عواملی هستند که سیگنال AFM دینامیکی را کوچک میکنند. در مورد حالت دینامیکی، مشکل از بین رفتن سوزن یا نمونه، که گاهی بعد از اسکنهای فراوان توسط حالت استاتیکی مشاهده میشود، وجود ندارد.
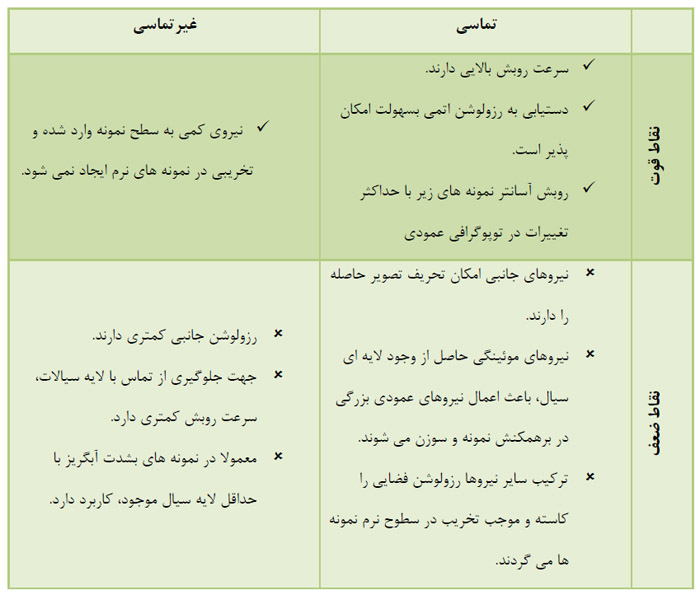
در مورد نمونههای صلب ممکن است تصاویر AFM استاتیکی و دینامیکی به یک گونه بهنظر برسند. ولی اگر برای مثال چند لایه آب روی سطح یک نمونه صلب میعان کرده باشد، ممکن است تصاویر کاملا متفاوت باشند. میکروسکوپ نیروی اتمی که در حالت استاتیکی کار میکند میتواند به این لایه نفوذ کند و سطح زیر آن را تصویر کند، در حالیکه در حالت AFM دینامیکی، سطح مایع را تصویر میکند. در جدول 1 نقاط ضعف و قوت AFM در حالتهای کاری مختلف ارائه شده است.
جدول ۱- نقاط قوت و ضعف حالات کاری [۱۶]
۹- جمعبندی و نتیجهگیری
در میکروسکوپ نیروی اتمی نیروی بین سوزن روبشگر و سطح نمونه که باعث خم شدن کانتیلور میشود، توسط آشکارساز اندازهگیری میشود. از این میکروسوپها علاوه بر اینکه میتوان جهت انواع نانولیتوگرافی و تولید نانوساختارها و نانوماشینکاری استفاده کرد، برای مطالعه خواص مکانیکی، سایش یا خراش و ...نیز بهکار میروند. این میکروسکوپها با دو حالت کاری استاتیکی(تماسی) و دینامیکی(غیر تماسی) کار میکنند. در حالت استاتیکی، کانتیلور در فاصله کم از سطح نمونه قرار دارد که هنگام روبش سوزن روی سطح نمونه، نیروی استاتیکی باعث خم شدن کانتیلور میشود. در این حالت نیروی بین کانتیلور و نمونه، نیروی دافعه است. حالت استاتیکی با دو مد کاری ارتفاع ثابت و نیرو ثابت کار میکند. در حالت دینامیکی، فرکانس رزونانس کانتیلور میتواند به عنوان معیار تغییر نیرو (یا تغییر فاصله سوزن تا نمونه) استفاده شود. در این حالت نیروی اتمی بین کانتیلور و نمونه، از نوع جاذبه است. در این حالت به علت عدم تماس با نمونههای نرم، تخریبی ایجاد نمیشود اما نسبت به حالت تماسی، سرعت روبش کمتری دارد.
۱۰- منابع
[1]-G. Binnig, C. Gerber, E. Stoll, T.R. Albrecht, C.F. Quate, Atomic resolution with atomic force microscope, Europhys. Lett. 3, 1281–1286 (1987).
[2]- Bharat Bhushan, "Springer Handbook of Nanotechnology", USA, Springer, (2004).
[۳]- علیرضا ذوالفقاری، محمد الماسی، پیروز مرعشی، مهرداد نجبا، امید سیفی، "میکروسکوپ پروبی روبشی آزمایشگاهی روی نوک سوزن"،تهران، پیکنور، (۱۳۸۵).
[4]-G.Meyer, N.M. Amer, Novel optical approach to atomic force microscopy, Appl. Phys. Lett. 53, 1045–1047 (1988).
[5]-B. Bhushan, S. Sundararajan, Micro-/nanoscale friction and wear mechanisms of thin films using atomic force and friction force microscopy, Acta Mater. 46, 3793–3804 (1998).
[6]-D.M. Eigler, E.K. Schweizer, Positioning single atoms with a scanning tunnelling microscope, Nature 344, 524–528 (1990).
[7]- A.L. Weisenhorn, J.E. MacDougall, J.A.C. Gould, S.D. Cox, W.S. Wise, J. Massie, P.Maivald, V.B. Elings, G.D. Stucky, P.K. Hansma, Imaging and manipulating of molecules on a zeolite surface with an atomic force microscope, Science 247, 1330–1333 (1990).
[8]- I.W. Lyo, P. Avouris, Field-induced nanometer-to-atomic-scale manipulation of silicon surfaces with the STM, Science 253, 173–176 (1991).
[9]- O.M. Leung, M.C. Goh, Orientation ordering of polymers by atomic force microscope tip-surface interactions, Science 225, 64–66 (1992).
[10]-A.Majumdar, P.I. Oden, J.P. Carrejo, L.A. Nagahara, J.J. Graham, J. Alexander, Nanometer scale lithography using the atomic force microscope, Appl. Phys. Lett. 61, 2293–2295 (1992).
[11]-B. Bhushan, O. Marti, "Scanning Probe Microscopy – Principle of Operation, Instrumentation, and Probes" ,Nanotribology and Nanomechanics, Springer, (2011).
[12]-D. Bonnell, (Ed.),"Scanning Probe Microscopy and Spectroscopy: Theory, Techniques, and Applications", 2nd ed., Wiley-VCH, New York, (2001).
[13]- M. Binggeli, R. Christoph, H.E. Hintermann, J. Colchero, O. Marti, Friction force measurements on potential controlled graphite in an electrolytic environment, Nanotechnology 4, 59–63 (1993).
[14]- Paolo Samori, "Scanning Probe Microscopies Beyond Imaging", WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim, (2006).
[15]-http://www.natsyco.com/
[16]- http://edu.nano.ir/paper/110
[17]-B. Bhushan, O. Marti, "Scanning Probe Microscopy – Principle of Operation, Instrumentation, and Probes" ,Nanotribology and Nanomechanics, Springer, (2011).
۱۱- پاورقیها
[1]Atomic Force Microscope
[2]GerdKarl Binnig
[3]Heinrich Rohrer
[4]Scanning Tunneling Microscope
[5]CalvinQuate
[6]Christoph Geber
[7]indentation hardness
[8] lateral force microscopy
[9]friction force microscopy
[10]cantilever
[۱۱]اثر پیزوالکتریک به زبان ساده، قابلیت برخی از مواد و کریستالها برای تبدبل انرژی مکانیکی به انرژی الکتریکی و تبدیل انرژی الکتریکی به مکانیکی است.
[12]Position-sensitive photo detrector
[13]capillary
[14]Real time